




Muito se fala de robótica, e sendo assim eu como gosto do assunto vou postar diversos exemplos.

Este inseto robó é simples de ser montado, basta um pouco de paciência e algumas peças.
Texto e fotos retirado do Site:
http://www.maxwellbohr.com.br/downloads/robotica/mec1000_kdr5000/projeto_-_robo_inseto.pdf
Para o post não ficar muito grande irei suprimir muitas partes, mas quem queira lêr por completo basta ir no Site.
Nesse tutorial, nosso objetivo será construir um “inseto”, um robô que possui seis “pernas” e
é conectado ao Kit e pode ser controlado através de um programa que roda num computador.
Através da construção de um robô inseto, podemos aplicar nossos conhecimentos de Eletrônica,
Mecânica e Programação adquiridos ao longo do curso e, consequentemente, aprimorar as técnicas
necessárias para a construção de robôs. Serão detalhadamente descritos o funcionamento e a
construção de um robô inseto, de modo que, além de possibilitar a sua elaboração, seja fornecida
uma base para a construção de robôs que utilizem um princípio de funcionamento semelhante.
Um fator importante que não pode ser negligenciado durante a montagem é a segurança. É
indispensável o uso de equipamentos de proteção individual (EPI's) tais como luvas, óculos de
proteção, jaleco, etc. Também é essencial tomar cuidados básicos para a prevenção de acidentes,
especialmente durante a manipulação de produtos químicos e ferramentas. Por pura falta de atenção
ou excesso de confiança, podem ser causados acidentes graves. E, além disso, os problemas
decorrentes da postura inadequada e da repetição excessiva de movimentos são vários e é muito
simples tomar providências para evitá-los. Não é difícil se conscientizar e realizar pequenas ações
que podem prevenir muitos acidentes.
é conectado ao Kit e pode ser controlado através de um programa que roda num computador.
Através da construção de um robô inseto, podemos aplicar nossos conhecimentos de Eletrônica,
Mecânica e Programação adquiridos ao longo do curso e, consequentemente, aprimorar as técnicas
necessárias para a construção de robôs. Serão detalhadamente descritos o funcionamento e a
construção de um robô inseto, de modo que, além de possibilitar a sua elaboração, seja fornecida
uma base para a construção de robôs que utilizem um princípio de funcionamento semelhante.
Um fator importante que não pode ser negligenciado durante a montagem é a segurança. É
indispensável o uso de equipamentos de proteção individual (EPI's) tais como luvas, óculos de
proteção, jaleco, etc. Também é essencial tomar cuidados básicos para a prevenção de acidentes,
especialmente durante a manipulação de produtos químicos e ferramentas. Por pura falta de atenção
ou excesso de confiança, podem ser causados acidentes graves. E, além disso, os problemas
decorrentes da postura inadequada e da repetição excessiva de movimentos são vários e é muito
simples tomar providências para evitá-los. Não é difícil se conscientizar e realizar pequenas ações
que podem prevenir muitos acidentes.
A base deste robô foi feita com madeirite, embora possam ser utilizados outros materiais
quaisquer, desde que tenham a resistência necessária. As suas dimensões são de 20 cm x 8 cm e
devem ser feitos furos nos seus quatro cantos a 0,5 cm de cada lateral, para que possamos encaixar
as suas pernas. As antepernas, a parte das pernas que serão fixadas à base de madeirite, terão dois
tamanhos como padrão, pois um par será tracionado por um servo-motor para que o inseto possa se
movimentar para frente enquanto que o outro par será movimentado através de barras de
transferência de movimento, ligadas às pernas tracionadas pelo servo-motor.
Apos cortar a base, certifique-se de que ela foi cortada corretamente, tirando novamente as
medidas. Ao marcar os pontos a serem furados, é até mais importante ver a distância interna entre
eles do que externa de 5 mm. Ao longo do comprimento da base, a distância entre os pontos deve
ser de exatamente 19 cm, enquanto que na largura deverão haver 7 cm. Essas distâncias devem ser
mantidas, não importando pequenas variações nas medidas externas de 0,5 cm até as laterais.
quaisquer, desde que tenham a resistência necessária. As suas dimensões são de 20 cm x 8 cm e
devem ser feitos furos nos seus quatro cantos a 0,5 cm de cada lateral, para que possamos encaixar
as suas pernas. As antepernas, a parte das pernas que serão fixadas à base de madeirite, terão dois
tamanhos como padrão, pois um par será tracionado por um servo-motor para que o inseto possa se
movimentar para frente enquanto que o outro par será movimentado através de barras de
transferência de movimento, ligadas às pernas tracionadas pelo servo-motor.
Apos cortar a base, certifique-se de que ela foi cortada corretamente, tirando novamente as
medidas. Ao marcar os pontos a serem furados, é até mais importante ver a distância interna entre
eles do que externa de 5 mm. Ao longo do comprimento da base, a distância entre os pontos deve
ser de exatamente 19 cm, enquanto que na largura deverão haver 7 cm. Essas distâncias devem ser
mantidas, não importando pequenas variações nas medidas externas de 0,5 cm até as laterais.

Figura 2: A base do inseto foi feita em madeirite. Os detalhes indicam os furos para a fixação das
antepernas.
antepernas.
Um detalhe importante é que, ao cortar peças compridas, com 15 cm ou mais, teremos
dificuldades com o arco de serra, já que o mesmo passará a pegar na madeira. Quando isso
acontecer, passe a utilizar o mini-arco, como poder ser observado nas figuras abaixo. Além disso,
sempre após cortar madeira ou alumínio, os mesmos devem ter suas beiradas lixadas, para retirar
rebarbas e imperfeições.
dificuldades com o arco de serra, já que o mesmo passará a pegar na madeira. Quando isso
acontecer, passe a utilizar o mini-arco, como poder ser observado nas figuras abaixo. Além disso,
sempre após cortar madeira ou alumínio, os mesmos devem ter suas beiradas lixadas, para retirar
rebarbas e imperfeições.
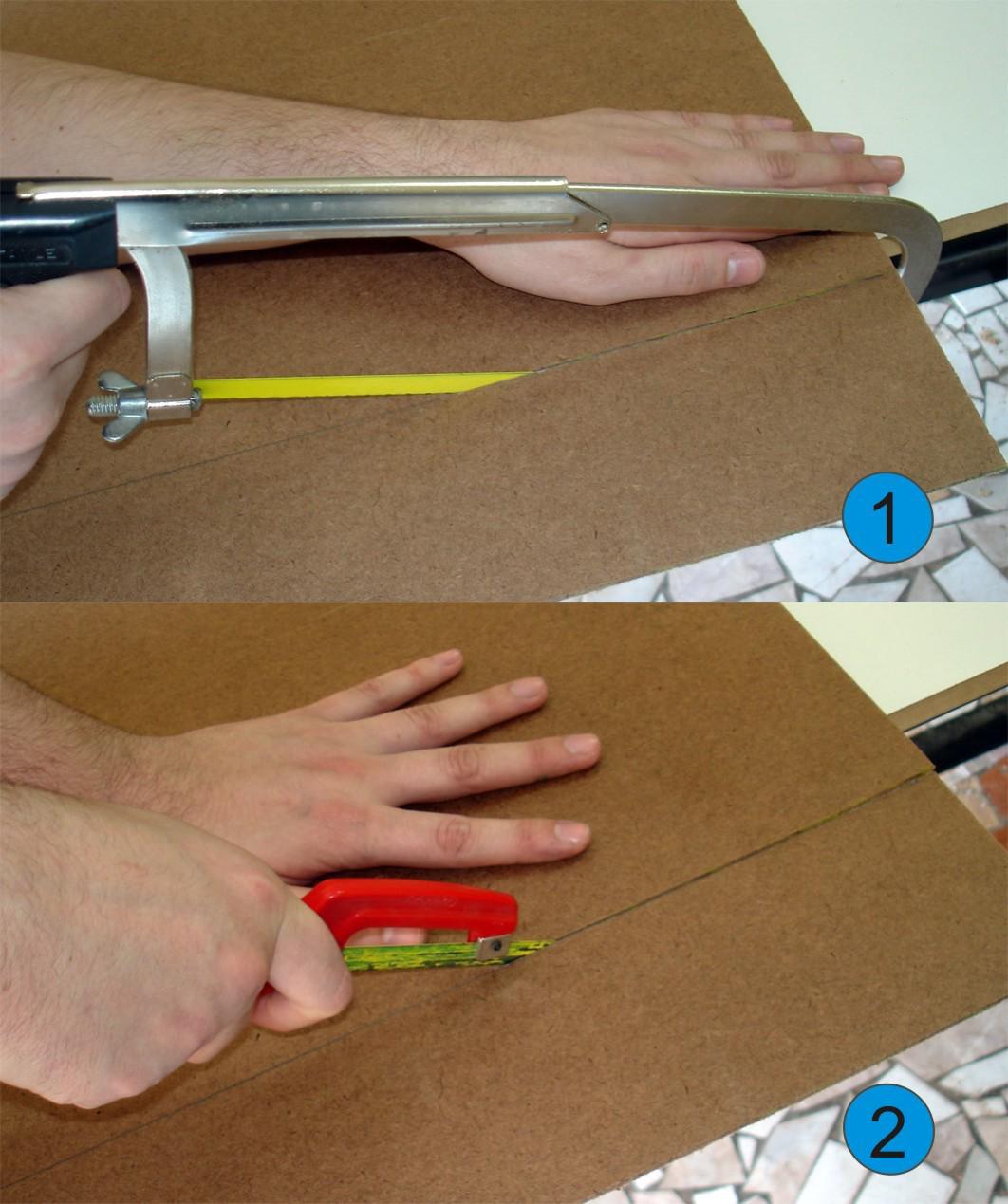
Figura 3: 1-Madeirite sendo cortado com o arco de serra. 2-Madeirite sendo
cortado com o mini-arco, quando a utilização do arco de serra torna-se difícil.
cortado com o mini-arco, quando a utilização do arco de serra torna-se difícil.
As antepernas do par que será diretamente tracionado pelo servo-motor terão o comprimento
de 10 cm enquanto que as do outro par terão 8 cm de comprimento. Nas duas barras de 8 cm
faremos os furos a 0,5 cm de uma extremidade, para encaixá-la na base, e outro a 2 cm deste, para,
posteriormente, encaixarmos uma barra para a transferência de movimento. Nas duas maiores
faremos uma sequência de três furos: um furo a 0,5 cm de uma extremidade, para que possamos
colocar hastes ligadas ao servo-motor de movimentação horizontal; um outro à 2 cm do primeiro
furo, para encaixá-las no corpo, e um terceiro à 2 cm do segundo furo, onde será fixada a barra para
a transferência do movimento.
de 10 cm enquanto que as do outro par terão 8 cm de comprimento. Nas duas barras de 8 cm
faremos os furos a 0,5 cm de uma extremidade, para encaixá-la na base, e outro a 2 cm deste, para,
posteriormente, encaixarmos uma barra para a transferência de movimento. Nas duas maiores
faremos uma sequência de três furos: um furo a 0,5 cm de uma extremidade, para que possamos
colocar hastes ligadas ao servo-motor de movimentação horizontal; um outro à 2 cm do primeiro
furo, para encaixá-las no corpo, e um terceiro à 2 cm do segundo furo, onde será fixada a barra para
a transferência do movimento.

Figura 4: Preparando as antepernas do inseto. 1-Cortando a barra de alumínio na serra de meia-esquadria. 2-As
barrras deverão ser furadas, de preferência com a furadeira de bancada.
barrras deverão ser furadas, de preferência com a furadeira de bancada.

Figura 5: Para retirar as rebarbas das barras de alumínio, basta girar levemente
uma broca de tamanho maior do que a utilizada para fazer o furo.
uma broca de tamanho maior do que a utilizada para fazer o furo.


Figura 6: Fixando as antepernas à base. 1-Prendendo a porca com o auxílio de uma chave de boca e um alicate de
bico. 2-Parafuso-eixo finalizado. 3-Anteperna presa à base através do eixo.
bico. 2-Parafuso-eixo finalizado. 3-Anteperna presa à base através do eixo.

Figura 7: Antepernas fixadas à base, com detalhes indicando o posicionamento dos furos. Observe que a anteperna de
10 cm possui uma extensão voltada para dentro da base.
10 cm possui uma extensão voltada para dentro da base.

Figura 8: Colocando as barras de transferência de movimento. 1-Definindo o tamanho da barra. 2-Fixando as barras
às antepernas com um eixo feito com parafuso, utilizando os mesmos procedimentos para fixar a anteperna à base.
às antepernas com um eixo feito com parafuso, utilizando os mesmos procedimentos para fixar a anteperna à base.

Figura 9: Colocando os pés do inseto. 1-Pé preso à anteperna através de um parafuso. As arruelas serrilhadas foram
colocadas entre as duas barras e entre a porca e a anteperna. 2-Movimento a ser realizado pelo inseto.
colocadas entre as duas barras e entre a porca e a anteperna. 2-Movimento a ser realizado pelo inseto.

Figura 10: Verificando as dimensões do furo para a haste, de acordo com a angulação das pernas.

Figura 11: Finalizando a haste-guia. 1-O estilete deve ser utilizado para o acabamento do furo. 2-Haste pronta.

Figura 12: Perna central do robô inseto. Observe que os furos realizados na
anteperna estão numa posição diferente dos realizados nas outras antepernas. O
furo da extremidade esquerda ligará a perna ao servo-motor de movimentação
vertical, enquanto que o furo central é destinado à fixá-lo ao corpo do robô.
anteperna estão numa posição diferente dos realizados nas outras antepernas. O
furo da extremidade esquerda ligará a perna ao servo-motor de movimentação
vertical, enquanto que o furo central é destinado à fixá-lo ao corpo do robô.

Figura 13: Definindo a posição das cantoneiras para a fixação das pernas centrais.
As indicações mostram como fazer os furos das cantoneiras
As indicações mostram como fazer os furos das cantoneiras

Figura 14: Estrutura do robô inseto completa.

Figura 15: Depois de criadas as engrenagens, devemos medir a distância
entre os seus centros, de modo a determinar a distância do potenciômetro ao
eixo do servo-motor.
entre os seus centros, de modo a determinar a distância do potenciômetro ao
eixo do servo-motor.

Figura 16: Cortando o MDF na serra de meia-esquadria para a criação dos
blocos de servo-motor.
blocos de servo-motor.

Figura 17: Marcações feitas no bloco de madeira e no plástico, utilizando a peça
de plástico padrão (à esquerda) como referência.
de plástico padrão (à esquerda) como referência.

Figura 18: 1-Peças de madeira e de plástico perfuradas, com indicação dos furos que podem ser feitos
com certa folga. 2-Furo para o potenciômetro sendo feito com a broca de madeira.
com certa folga. 2-Furo para o potenciômetro sendo feito com a broca de madeira.

Figura 19: A madeira deverá ser cortada para o encaixe do potenciômetro. 1-Observe a marcação de onde será feito o
corte. 2-Corte sendo feito na serra de meia-esquadria. Observe que os parafusos foram colocados nos dois furos
próximos.
corte. 2-Corte sendo feito na serra de meia-esquadria. Observe que os parafusos foram colocados nos dois furos
próximos.

Figura 20: Criação do pino-eixo 1-Pequeno bloco de madeira para o encaixe do pino-eixo. Ele deve se manter
firmemente preso à esse bloco. 2-Marcação no pino-eixo do furo para o encaixe do parafuso. 3-Pino-eixo sendo
perfurado com a broca de 1/8”. É importante que o furo não seja torto nem muito profundo. 4-Pino-eixo já
perfurado. 5-Para retirar o pino-eixo do bloco de madeira, deve-se martelar esse bloco até que ele se abra. 6-O
parafuso com a engrenagem pode então ser colado ao furo do pino-eixo com a cola de secagem instantânea.
firmemente preso à esse bloco. 2-Marcação no pino-eixo do furo para o encaixe do parafuso. 3-Pino-eixo sendo
perfurado com a broca de 1/8”. É importante que o furo não seja torto nem muito profundo. 4-Pino-eixo já
perfurado. 5-Para retirar o pino-eixo do bloco de madeira, deve-se martelar esse bloco até que ele se abra. 6-O
parafuso com a engrenagem pode então ser colado ao furo do pino-eixo com a cola de secagem instantânea.

Figura 21: Bloco de fixação do servo-motor com o pino-eixo. 1-Visão superior. Os dois furos que sobram são
destinados a fixar o servo-motor. 2-Visão inferior, do lado do servo-motor. 3-A região do pino-eixo que entrará em
contato com o plástico do bloco deverá ser lubrificada.
destinados a fixar o servo-motor. 2-Visão inferior, do lado do servo-motor. 3-A região do pino-eixo que entrará em
contato com o plástico do bloco deverá ser lubrificada.

Figura 22: Servo-motor com o potenciômetro externo. A tampa do servo-motor foi
perfurada para a passagem dos fios que foram ligados ao potenciômetro.
perfurada para a passagem dos fios que foram ligados ao potenciômetro.

Figura 23: Engrenagem responsável pela redução e transferência do movimento
para as pernas.
para as pernas.

Figura 24: Marcando os furos a serem feitos no corpo do inseto, para a fixação do bloco do
servo-motor de movimentação horizontal. Os furos devem estar perfeitamente alinhados.
servo-motor de movimentação horizontal. Os furos devem estar perfeitamente alinhados.

Figura 25: Corpo do robô com os furos para o encaixe do bloco de movimentação
horizontal.
horizontal.

Figura 26: Bloco do servo-motor montado. Dos quatro furos próximos ao eixo
do servo-motor, dois foram utilizados para fixar a peça de plástico PVC. Os
outros dois são utilizados para prender o próprio servo-motor ao bloco. Esses
parafusos não estão visíveis na foto, pois foram presos a partir do outro lado.
do servo-motor, dois foram utilizados para fixar a peça de plástico PVC. Os
outros dois são utilizados para prender o próprio servo-motor ao bloco. Esses
parafusos não estão visíveis na foto, pois foram presos a partir do outro lado.

Figura 27: O bloco do servo-motor de movimentação horizontal foi fixado ao corpo
do robô inseto através de dois parafusos e porcas, próximos ao eixo do
potenciômetro (abaixo).
do robô inseto através de dois parafusos e porcas, próximos ao eixo do
potenciômetro (abaixo).

Figura 28: Engrenagem sendo colada ao potenciômetro. Faça esse procedimento
apenas se tiver certeza que não será mais necessário alterar o bloco, caso
contrário, deixe-o para o final.
apenas se tiver certeza que não será mais necessário alterar o bloco, caso
contrário, deixe-o para o final.

Figura 29: Definindo as dimensões das hastes de PVC, responsáveis por
transferir o movimento do servo-motor às pernas do inseto.
transferir o movimento do servo-motor às pernas do inseto.

Figura 30: Hastes prontas e fixadas à engrenagem do servo-motor e às pernas do
inseto através de parafusos, porcas e arruelas.
inseto através de parafusos, porcas e arruelas.

Figura 31: Furo para a passagem das hastes do servo-motor de movimentação
vertical. Foram feitos alguns furos com a furadeira de bancada, que serão
interligados com a microrretífica.
vertical. Foram feitos alguns furos com a furadeira de bancada, que serão
interligados com a microrretífica.

Figura 32: Demarcando a posição do bloco no corpo do inseto.

Figura 33: Furos para a fixação do bloco do servo-motor.

Figura 34: Bloco do servo-motor de movimentação vertical fixado através de
parafusos autoatarraxantes.
parafusos autoatarraxantes.

Figura 35: Colocando as hastes de transmissão de movimento do servo-motor às pernas de inclinação do robô. 1-
Definindo o seu tamanho. 2-Visão inferior do corpo do robô inseto.
Definindo o seu tamanho. 2-Visão inferior do corpo do robô inseto.

Figura 36: Finalizando o corpo do inseto. 1-Hastes fixadas às engrenagens. 2-Após a finalização do corpo do inseto,
podemos terminar alguns detalhes, como pontos a serem lubrificados e colagens.
podemos terminar alguns detalhes, como pontos a serem lubrificados e colagens.

Figura 37: "Sapatos" de borracha colocados nas pernas das extremidades,
proporcionando maior aderência. As pernas centrais não necessitam deles, pois
devem deslizar.
proporcionando maior aderência. As pernas centrais não necessitam deles, pois
devem deslizar.

Versão do robô inseto sem engrenagens de redução. Observe que este
modelo conta com um acabamento, feito com papel laminado vermelho.
modelo conta com um acabamento, feito com papel laminado vermelho.

Utilização de travas para prender a haste. 1-Visão do bloco de movimentação horizontal. 2-Visão do bloco
de movimentação vertical.
de movimentação vertical.
Eletrônica
A eletrônica envolvida com o robô inseto é simples. Serão descritos apenas alguns detalhes
em relação à conexão do inseto, sua alimentação e o potenciômetro externo dos servo-motores.
Para conectar o inseto ao KDR5000, deverá ser utilizado o Módulo de Entradas, Saídas e
Servo-Motores. É recomendado utilizar o primeiro conector de servo-motores disponível, tendo em
vista que o MEC1000 possui uma quantidade de portas menor e o programa deverá ser compatível
com os dois.
Para conectar o servo-motor de movimento vertical é recomendado utilizar a porta Servo 0,
enquanto que para o servo-motor de movimento horizontal, é recomendado a porta Servo 1. É
possível ligar os servo-motores em outras portas, mas a conexão descrita acima foi padronizada
para facilitar a programação. Caso haja dúvidas sobre a conexão, basta consultar os manuais desses
equipamentos.
Não é necessária uma fonte de alimentação externa para o inseto, pois como ele possui
apenas dois servo-motores, a corrente consumida por ele pode ser suportada pela fonte própria do
MEC1000 ou do KDR5000. Podem ser utilizadas as saídas de alimentação disponíveis nos
conectores destinados ao seu controle.
Para conectar o robô inseto ao Kit, é recomendado utilizar um cabo de grande extensão, para
que ele tenha uma maior liberdade de movimento. Também é interessante usar um conector (DB-9,
por exemplo) para ligar esse cabo ao inseto, para facilitar o transporte do robô. Esse cabo também
pode ser utilizado para conectar o robô bípede ao Kit, desde que os conectores tenham a mesma
pinagem, ou seja, que os cabos estejam soldados nos conectores de forma semelhante.
O potenciômetro externo dos servo-motores deverá ter seus terminais ligados de forma
invertida em relação ao potenciômetro original, tendo em vista que a engrenagem a qual ele está
ligado gira no sentido inverso ao eixo do servo-motor.
A eletrônica envolvida com o robô inseto é simples. Serão descritos apenas alguns detalhes
em relação à conexão do inseto, sua alimentação e o potenciômetro externo dos servo-motores.
Para conectar o inseto ao KDR5000, deverá ser utilizado o Módulo de Entradas, Saídas e
Servo-Motores. É recomendado utilizar o primeiro conector de servo-motores disponível, tendo em
vista que o MEC1000 possui uma quantidade de portas menor e o programa deverá ser compatível
com os dois.
Para conectar o servo-motor de movimento vertical é recomendado utilizar a porta Servo 0,
enquanto que para o servo-motor de movimento horizontal, é recomendado a porta Servo 1. É
possível ligar os servo-motores em outras portas, mas a conexão descrita acima foi padronizada
para facilitar a programação. Caso haja dúvidas sobre a conexão, basta consultar os manuais desses
equipamentos.
Não é necessária uma fonte de alimentação externa para o inseto, pois como ele possui
apenas dois servo-motores, a corrente consumida por ele pode ser suportada pela fonte própria do
MEC1000 ou do KDR5000. Podem ser utilizadas as saídas de alimentação disponíveis nos
conectores destinados ao seu controle.
Para conectar o robô inseto ao Kit, é recomendado utilizar um cabo de grande extensão, para
que ele tenha uma maior liberdade de movimento. Também é interessante usar um conector (DB-9,
por exemplo) para ligar esse cabo ao inseto, para facilitar o transporte do robô. Esse cabo também
pode ser utilizado para conectar o robô bípede ao Kit, desde que os conectores tenham a mesma
pinagem, ou seja, que os cabos estejam soldados nos conectores de forma semelhante.
O potenciômetro externo dos servo-motores deverá ter seus terminais ligados de forma
invertida em relação ao potenciômetro original, tendo em vista que a engrenagem a qual ele está
ligado gira no sentido inverso ao eixo do servo-motor.
Programação
Para que o nosso robô inseto possa funcionar perfeitamente, ele deverá ser controlado de
modo adequado. Sendo assim, devemos criar um programa que faça com que o Kit acione os servomotores
de modo que o inseto possa se deslocar.
Através do programa descrito nesse tutorial, o Kit acionará os servo-motores de
movimentação vertical e horizontal. De acordo com o modo que os servo-motores forem acionados,
o inseto poderá se movimentar para frente ou para trás ou virar para a direita ou esquerda. Porém,
devido à sua estrutura mecânica, o movimento que o inseto realiza para virar não é tão ágil quanto a
do robô bípede. Além disso, adicionamos um comando para que o robô fique na posição de repouso,
o que é útil antes de desligá-lo.
Para que o nosso robô inseto possa funcionar perfeitamente, ele deverá ser controlado de
modo adequado. Sendo assim, devemos criar um programa que faça com que o Kit acione os servomotores
de modo que o inseto possa se deslocar.
Através do programa descrito nesse tutorial, o Kit acionará os servo-motores de
movimentação vertical e horizontal. De acordo com o modo que os servo-motores forem acionados,
o inseto poderá se movimentar para frente ou para trás ou virar para a direita ou esquerda. Porém,
devido à sua estrutura mecânica, o movimento que o inseto realiza para virar não é tão ágil quanto a
do robô bípede. Além disso, adicionamos um comando para que o robô fique na posição de repouso,
o que é útil antes de desligá-lo.
A parte de programação está descrita no tutorial no endereço abaixo.
http://www.maxwellbohr.com.br/downloads/robotica/mec1000_kdr5000/projeto_-_robo_inseto.pdf
Espero ter ajudado algumas pessoas que querem fazer o seu primeiro Robó.
Nenhum comentário :
Postar um comentário